



Encoder di tipo a ingranaggi per segnali di uscita seno/coseno serie GE-A

Encoder di segnali di uscita seno/coseno serie GE-A
Sensore di velocità e posizione ad alta precisione con uscita seno/coseno, supporta la funzione di debug online
Applicazione:

Mandrino - Motore CNC Misurazione della velocità della macchina Posizionamento
n Rilevamento della posizione rotativa e della velocità nelle macchine CNC
n Energia e sistemi di generazione di energia
n Attrezzature ferroviarie
n Ascensori
Descrizione generale
Gli encoder GE-A Gear Type sono encoder incrementali senza contatto per la misurazione della velocità di rotazione e della posizione. Basati sull'esclusiva tecnologia dei sensori di magnetoresistenza a tunnel (TMR) di Gertech, forniscono segnali sin/cos differenziali ortogonali di alta qualità, insieme a un segnale di indice e ai relativi segnali inversi. Le serie GE-A sono progettate per ingranaggi da 0,3~1,0 moduli con diversi numeri di denti.
Caratteristiche
Ampiezza del segnale di uscita in 1 Vpp con alta qualità
Risposta ad alta frequenza fino a 1 MHz
Intervallo di temperatura operativa da -40°C a 100°C
Grado di protezione IP68
Vantaggi
n Custodia completamente sigillata con custodia in metallo per garantire il massimo livello di protezione
n La misurazione senza contatto, esente da abrasione e vibrazioni, può funzionare in ambienti difficili come acqua, olio o polvere
n La debole induzione magnetica impedisce la magnetizzazione dell'ingranaggio e la superficie dell'encoder non assorbe facilmente la limatura di ferro
n Ampia tolleranza al traferro e alla posizione di installazione con sensori TMR ad alta sensibilità
n Per i denti indice sono consentiti sia il tipo convesso che concavo
Parametri Elettrici
| SIMBOLO | NOME PARAMETRO | VALORE | NOTA |
| Vcc | Tensione di alimentazione | 5±10%V | DC |
| Lo zoticone | Corrente di uscita | ≤20mA | Nessun carico |
| Va bene | Segnale di uscita | seno/cos (1Vpp±10%) |
|
| Fin | Frequenza di ingresso | ≤1MHz |
|
| Fout | Frequenza di uscita | ≤1MHz |
|
|
| Fase | 90°±5% |
|
|
| Metodo di calibrazione | Manuale |
|
|
| Resistenza di isolamento | 10MΩ | CC 500 V |
|
| Resistere alla tensione | CA500 V | 1 minuto |
|
| Impulso gruppo EMC | 4000 V |
Parametri meccanici
| SIMBOLO | NOME PARAMETRO | VALORE | NOTA |
| D | Distanza tra i fori di montaggio | 27 mm | Utilizzando due viti M4 |
| Spacco | Montaggio Air-gap | 0,2/0,3/0,5 mm | Corrispondente a 0,4/0,5/0,8- modulo rispettivamente |
| Tol | Tolleranza di montaggio | ±0,05 mm |
|
| To | Temperatura operativa | -40~100°C |
|
| Ts | Temperatura di conservazione | -40~100°C |
|
| P | Grado di protezione | IP68 | Alloggiamento in lega di zinco, completamente sigillato |
Parametri dell'ingranaggio consigliati
| SIMBOLO | NOME PARAMETRO | VALORE | NOTA |
| M | Modulo ingranaggi | 0,3~1,0 mm |
|
| Z | Numero di denti | nessun limite |
|
| δ | Larghezza | Min.10mm | Consiglia 12 mm |
|
| Materiale | acciaio ferromagnetico | Consiglia 45#acciaio |
|
| Forma del dente indice | dente convesso/concavo | Consiglia dente concavo |
|
| Rapporto larghezza dente tra due strati | 1:1 | La larghezza del dente indice è di 6 mm |
|
| Precisione dell'ingranaggio | sopra il livello ISO8 | Corrispondente al livello JIS4 |
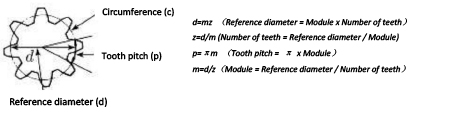
Metodo di calcolo dei parametri dell'ingranaggio:
Segnali di uscita
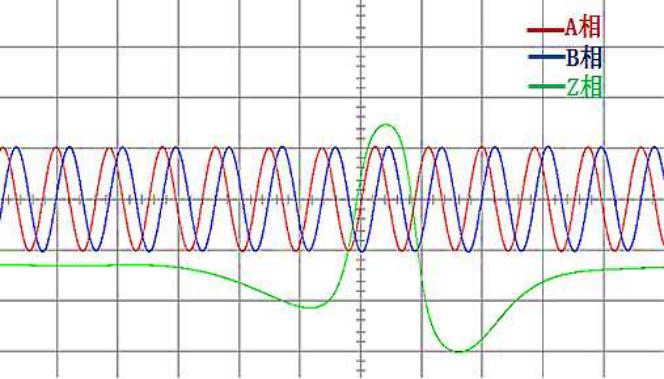
I segnali di uscita dell'encoder sono segnali differenziali seno/coseno con ampiezza 1 Vpp insieme al segnale indice. Sono presenti sei terminali di uscita, inclusi A+/A-/B+/B-/Z+/Z-. I segnali A/B sono due segnali seno/coseno differenziali ortogonali e il segnale Z è il segnale indice.
La tabella seguente riporta i segnali XT differenziali A/B/Z misurati.
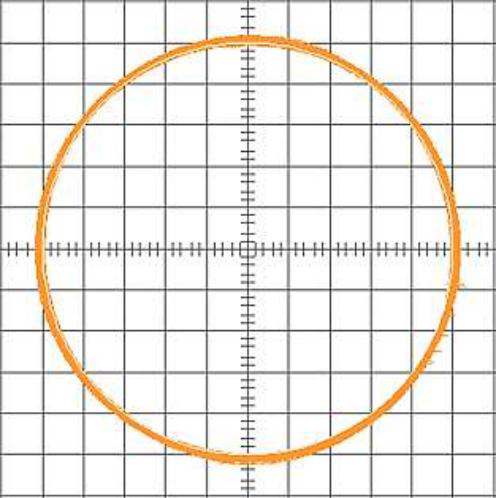
Il grafico seguente è la figura di Lissajous dei segnali XY misurati.
Modulo ingranaggi
La serie di prodotti GE-A è progettata per ingranaggi con modulo 0,3~1,0 e il numero di denti può variare.
La tabella seguente mostra il traferro di montaggio consigliato sotto il modulo 0,4/0,5/0,8.
| Modulo ingranaggi | Montaggio Air-gap | Tolleranza di montaggio |
| 0.4 | 0,2 mm | ±0,05 mm |
| 0,5 | 0,3 mm | ±0,05 mm |
| 0,8 | 0,5 mm | ±0,05 mm |
Numero di denti
Per ottenere risultati ottimali, l'encoder deve abbinare gli ingranaggi con il numero corretto di denti. Il numero consigliatodi denti è 128, 256 o 512. La piccola differenza nel numero di denti è accettabile senza influire sulla qualità dei dentii segnali in uscita.
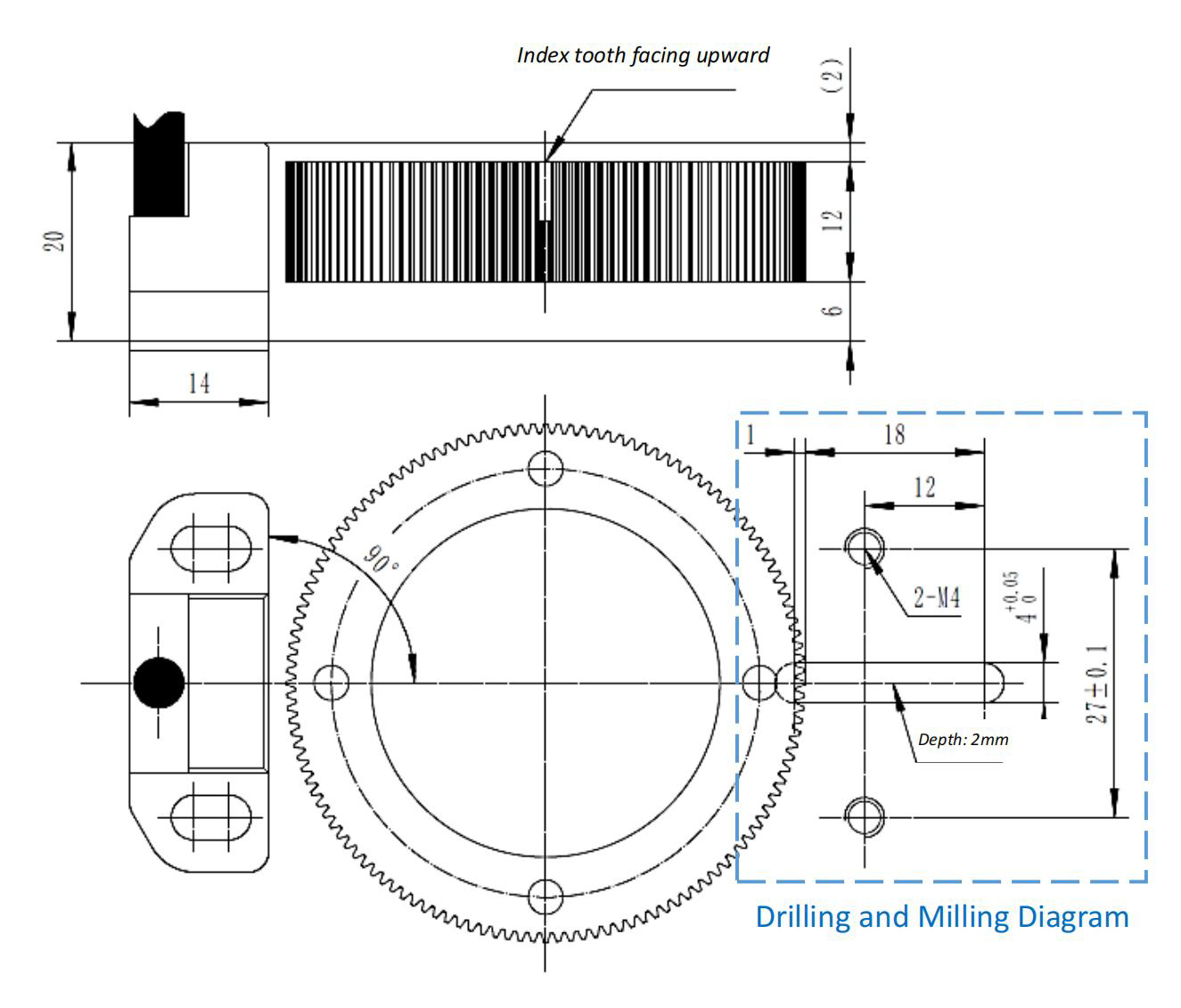
Procedura di installazione
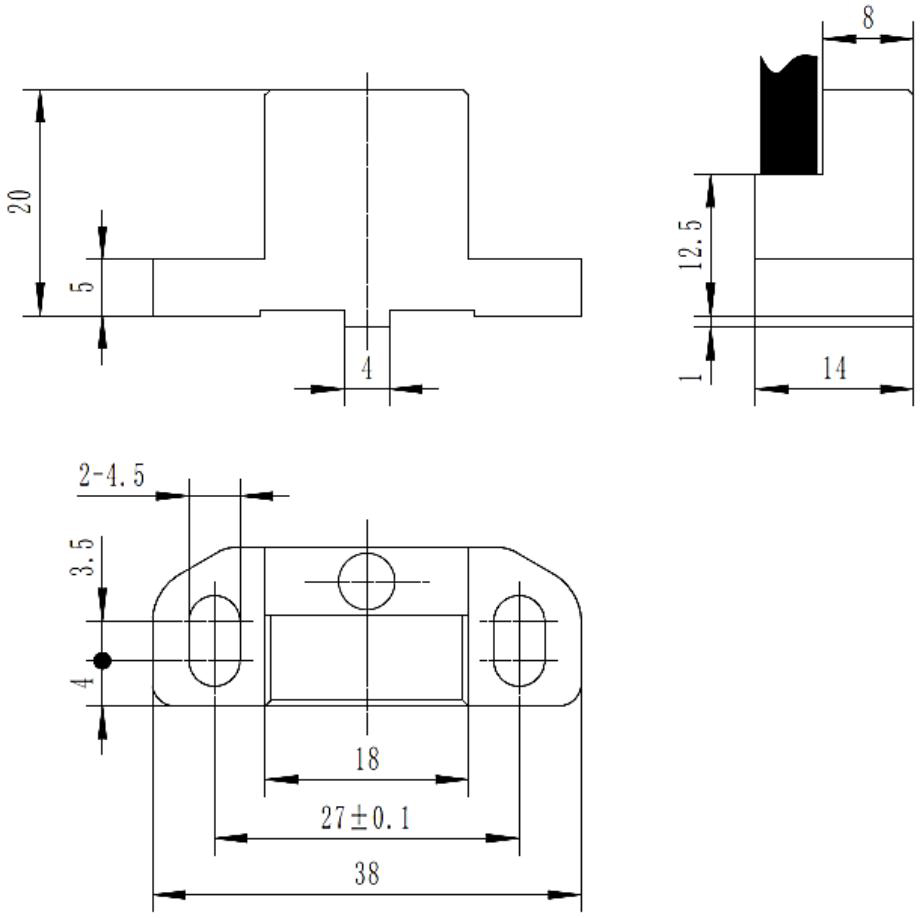
L'encoder presenta un design compatto con una distanza tra due fori di montaggio pari a 27 mmcompatibile con la maggior parte dei prodotti simili sul mercato. La procedura di installazione è la seguente.
1. Montare l'encoder utilizzando due viti M4. Le viti non devono essere ancora serrate saldamente per consentire la regolazioneil traferro di montaggio.
2. Inserire uno spessimetro dello spessore desiderato al centro dell'encoder e dell'ingranaggio. Spostare l'encoder versol'ingranaggio fino a quando non vi è più spazio tra l'encoder, lo spessimetro e l'ingranaggio e lo tastatore può essere rimossosenza intoppi senza applicare ulteriore forza.
3. Stringere saldamente le due viti M4 ed estrarre lo spessimetro.
Grazie alla capacità di autocalibrazione incorporata dell'encoder, questo produrrà il segnale di uscita desiderato purché sia correttoil traferro di montaggio è garantito dalla procedura di cui sopra entro la tolleranza.
Cavo
Il cavo dell'encoder della versione normale è costituito da otto fili schermati a doppino intrecciato. La sezione trasversale del cavoil nucleo è 0,14 mm2 e il diametro esterno è 5,0 ± 0,2 mm. Per impostazione predefinita, la lunghezza del cavo è 1 m、3 m、5 m.Il cavo dell'encoder della versione avanzata è costituito da dieci fili schermati a doppino intrecciato. La sezione trasversale del cavoil nucleo è 0,14 mm2 e il diametro esterno è 5,0 ± 0,2 mm. Per impostazione predefinita, la lunghezza del cavo è 1 m、3 m、5 m.
Dimensioni
Posizione di montaggio
Codice ordine

1: Encoder del tipo di ingranaggio
2(Modulo ingranaggio):04:0:4 moduli 05:0:5 moduli 0X: modulo 0:X;
3(A:Tipo segnali Sin/Cos): A:Segnali Sin/Cos;
4(Interpolazione):1 (predefinito);
5(Forma dell'indice):F: dente concavo M: dente convesso;
6(Numero di denti):128.256.512,XXX;
7(Lunghezza cavo):1m(standard),3m,5m;
8(Debug in linea):1:supporto, 0:non supportato;
Le informazioni qui fornite sono ritenute accurate e affidabili. La pubblicazione non trasmette né implica alcuna licenza di brevetto o altro diritto di proprietà industriale o intellettuale. Gertech si riserva il diritto di apportare modifiche alle specifiche del prodotto allo scopo di migliorare la qualità, l'affidabilità e la funzionalità del prodotto. Gertech non si assume alcuna responsabilità derivante dall'applicazione e dall'uso dei suoi prodotti. I clienti di Gertecg che utilizzano o vendono questo prodotto per l'uso in apparecchi, dispositivi o sistemi in cui si può ragionevolmente prevedere che un malfunzionamento provochi lesioni personali, lo fanno a proprio rischio e accettano di risarcire completamente Gertech per eventuali danni derivanti da tali applicazioni.
-
Campo di misura serie GI-D200 0-15.000/20.000 mm...
-

Prezzo all'ingrosso 2019 Pulsossimetro da dito
-

Encoder ad albero cavo di alta reputazione Trd-RV, Tr...
-
Listino prezzi economico per encoder a filo con Cano...
-
Professional China Miran Wide Range Draw Wire R ...
-
Encoder a filo di migliore qualità con Modbus Abso...




